1、Protsessi tutvustus | Mida saab robotkeevitus lahendada?
Kõrge konsistents: korratavuse täpsus ± 0,05 mm, stabiilne keevisõmbluse välimus ja läbitungimissügavus, välistab käsitsi kõikumised.
Suur kiirus: MIG kiirus võib ulatuda 1,2 m/min-ni, mis on 2-3 korda kiirem kui käsitsijuhtimine. Kontrollitav soojussisend: impulss/kahe impulsi/külma metalli ülemineku (CMT) režiim, lehe deformatsiooni vähendamine ≤ 1 mm Mitme protsessi lülitus: MIG/MAG/TIG/plasma kaar/laserkomposiit,
üks masin mitmeks otstarbeks
2, Võimalused
| Üksus | Parameeter |
|---|---|
| Maksimaalne tooriku suurus | 3500 × 1500 × 800 mm (kaheteljelise positsioneerijaga) |
| Materjali paksus | 0,8 mm – 60 mm |
| Materjali tüübid | Süsinikteras, roostevaba teras, alumiinium, vask, titaanisulam, kroommolübdeenteras |
| Keevisõmbluste tüübid | Filee, tagumik, süles, ümbermõõdud, ruumilised ristuvad jooned |
| Keevituspositsioonid | Lame, horisontaalne, vertikaalne, pea kohal, igas asendis |
| Partii mahutavus | 1 – 1000 tk/partii, 24-tunnine pidev töö |
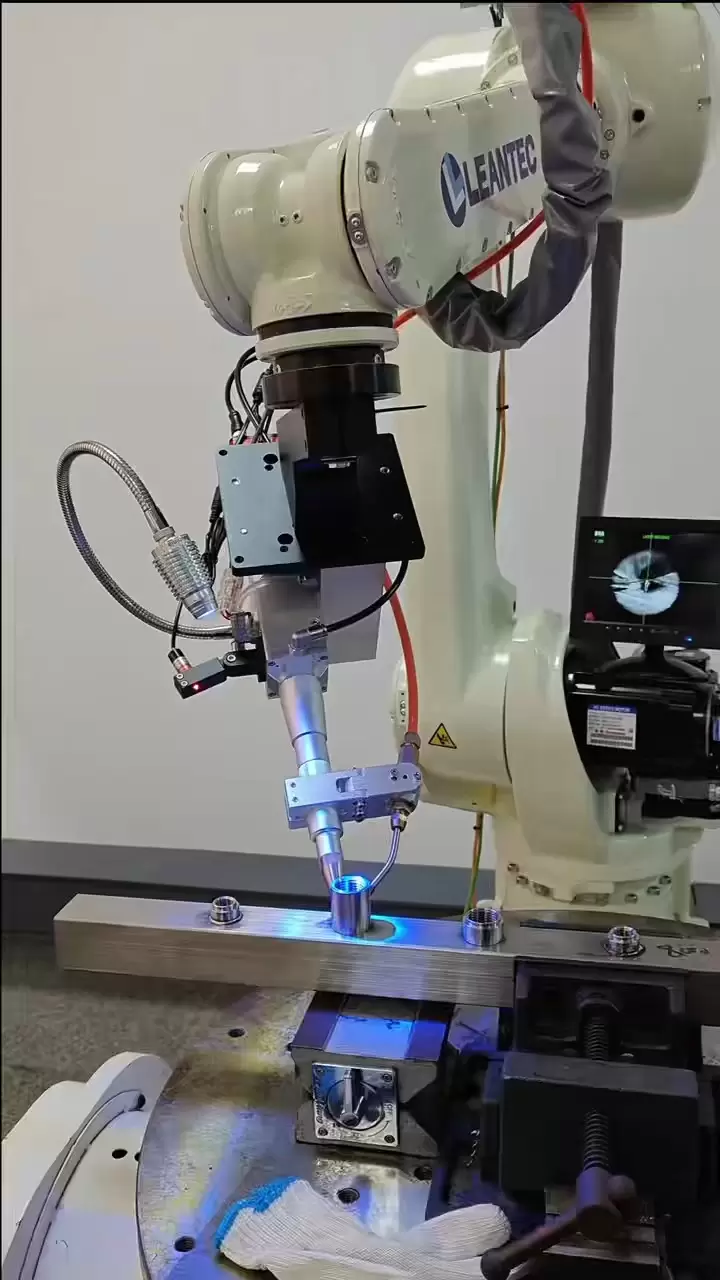
3. Meie varustus
Fanuc M-20iA + Lincoln Power Wave i400
Kuueteljeline koormus 20 kg, korratavuse täpsusega ± 0,02 mm
Impulss MIG/MAG, alumiiniumi paksus 1 mm-20 mm ilma pritsmeteta
KUKA KR30-3 + Fronius TPS 500i
Väline kaheteljeline positsioneerija, pöörde läbimõõduga 3,5 meetrit
Süsinikterasest paksust plaadist mitmekihiline ja mitmekäiguline keevitamine, ühe külje läbimõõt 60 mm
ABB IRB 4600+laser komposiitpea 4 kW
Laser MIG komposiit, kiirus 2 m/min, deformatsioon <0,5 mm
Spetsiaalselt mõeldud pikkade keevisõmbluste jaoks roostevabast terasest lehtedel
Yaskawa MA1440+TIG külmtraat
Titaanisulamist ja kroommolübdeenterasest surveanumad, juurkeevituse ja traadi täitmisega ühekorraga
puhta ruumi tasemel gaasikaitsekamber, hapnikusisaldus <50 ppm
4, keevitamise juhtumiuuringud | Robotkeevituskastid
Keevisõmblus: 4 meetri pikkune perifeerne nurga keevisõmblus + sisemine tugevduse ülekate
Protsess: Pulse MIG, kahe roboti kahe jaama vaheldumine
Tulemus: keevituskiirus 1,0 m/min, deformatsioon ≤ 1 mm, röntgeni esmase kile kiirus 99%
Löök: 90 sekundit tüki kohta, igapäevane toodang 960 tükki
Keevisõmblus: 30 mm paksune põkkliide + 70 ° soon
Protsess: Robot MAG mitmekihiline ja mitmekäiguline, välistelje ümberpööramine
Tulemus: löögienergia temperatuuril -20 ℃ on ≥ 80 J, mis vastab Euroopa CE-sertifikaadile
Tarne: 300 liikuva käe igakuine tootmine, esmakordse läbimise määr on 98%
Keevisõmblus: Ti-6Al-4V õhukeseseinaline 1,5 mm TIG põkkühendus
Protsess: Roboti külmtraat TIG+puhas ruum, hapnikusisaldus <30 ppm
Tulemus: keevisõmbluse värvus on hõbevalge, ilma oksüdatsioonita ja tõmbetugevus on ≥ 950 MPa
Testimine: lennunduskliendi CT+ultraheli topeltkontrolli kaudu
5, kvaliteet ja sertifitseerimine
ISO 3834-2 keevitamise kvaliteedisüsteem
EN 1090-EXCEL3/EN 15085-CL1 teraskonstruktsioonide/raudteesõidukite sertifikaat
AWS D1.1/D1.2 süsinikterasest/alumiiniumist konstruktsiooni sertifitseerimine
Iga keevisõmblusega kaasneb UII-keevitusnumber ja traattraatidega ühendamise number, parameetrite QR-koodi skaneerimine, gaasijuhtme skaneerimine.
6 、 Miks valida robotkeevitus?
24-tunnine pidev tootmine vähendab teostusaega 40% võrra
Keevituse parandamise määr <1%, säästa järgnevaid poleerimis-/keevitusparandusi.
Andmesilmus: keevitusvoolu, pinge ja kiiruse reaalajas üleslaadimine MES-i, PDF-aruande genereerimine ühe klõpsuga
Paindlik programmeerimine: uus toode suudab võrguühenduseta programmeerimise lõpule viia 30 minutiga ilma masinat õpetamiseks peatamata.
Usalda usaldusväärsust
Aastatepikkune ekspordikogemus globaalsetele turgudele, mis tõestab meie usaldusväärsust kvaliteedi, logistika ja vastavuse osas.
Sertifitseeritud kvaliteedijuhtimine ja standardiseeritud tootmine tagavad iga tellimuse jaoks usaldusväärsed ja korratavad tulemused.
Milliseid tolerantse saate saavutada?
Meie standardne tolerants CNC-töötlemisel on DIN-2768-1-f (peen) või +/-0,01 mm. Kõrge täpsusega nõuete täitmiseks saame olenevalt geomeetriast ja materjalist saavutada kuni +/-0,005 mm tolerantsid.
Milliseid pinnaviimistlusi pakute?
Pakume ühekordseid pinnatöötlusteenuseid, sealhulgas: mehaaniliselt töödeldud (tühjendatud) liivapritsiga anodeerimine (tüüp II, tüüp III) poleerimine peegli poleerimine pulbervärvimine värvimine lasergraveerimine (logo/tekst)
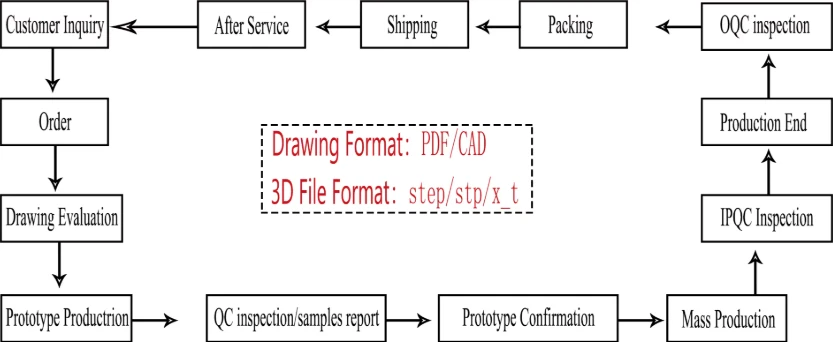
Kui kiiresti ma saan hinnapakkumise?
Saatke meile oma 3D-failid (STEP/IGES) ja 2D-joonised (PDF). Meie insenerimeeskond analüüsib neid ja esitab üksikasjaliku hinnapakkumise 6–12 tunni jooksul.
Mis on teie tüüpiline tarneaeg?
Prototüübid: 3-7 päeva Tootmine 10-20 päeva Pakume ka kiireloomuliste projektide jaoks kiirteenust.
Kas pakute proove enne masstootmist?
Jah, me soovitame alati teha kinnitamiseks tootmiseelse näidise. Saadame teile fotod/videod või saadame teile füüsilise näidise kontrollimiseks enne kogu partii käivitamist.
Mis siis, kui osad ei vasta spetsifikatsioonidele?
Meil on range kvaliteedikontrolli poliitika. Kui osad ei vasta joonise spetsifikatsioonidele, teeme need tasuta ümber või tagastame kogu raha. Seisame 100% oma kvaliteedi taga.
Milliseid materjale saate töödelda?
Töötame mitmesuguste materjalidega, sealhulgas: metallid, alumiinium (6061, 7075), roostevaba teras (303, 304, 316), messing, vask, titaanplastid: ABS, POM (Delrin), PEEK, nailon, polükarbonaat. Kui vajate spetsiaalset materjali, andke meile sellest lihtsalt teada.

 AadressXingpu tee nr 66, Lujia linn, Kunshani linn, tehasehooned 3 ja 4
AadressXingpu tee nr 66, Lujia linn, Kunshani linn, tehasehooned 3 ja 4  et
et
 English
English 繁体中文
繁体中文 Italian
Italian Spanish
Spanish Japanese
Japanese Portuguese
Portuguese Korean
Korean Russian
Russian French
French German
German Estonian
Estonian Arabic
Arabic Indonesian
Indonesian


 Sõnum
Sõnum